Computer Photography:Image Alignment
in posts on programming, computer vision
一周过去了,忙忙碌碌做了不少事,现在又到安心写博客的时间啦~
恩,继续写写我的作业。这次是计算机视觉领域的课程,作业具体内容是,给你三张RGB通道的图片,把它们合成为一张彩色图片。
如果仅仅是同一张图的三个通道,这个任务就简单多了。但这三张图是有一些差别的,而且它们的来头不小。这次作业的数据集来自著名的俄国摄影家Sergei Mikhailovich Prokudin-Gorskii(1863-1944)(抱歉这字我读不顺)。关于他的事迹,你可以到wiki上详细查看。简单讲,就是在那个没有彩色相机的时代,他发明了一种能捕捉彩色图像的方法:用三种不同颜色的滤镜(红绿蓝)罩住黑白相机的镜头,然后拍下三种照片,之后把三个照片叠加在一起,透过光就可以看到彩色图片。真是很天才的想法。因为三张图片并非完全相同,所以它们之间会有细微的位移、旋转、缩放等差别。
因此,我们的任务是:找到每个通道图片相互最佳匹配的位置,然后在对应位置把他们叠加起来。呈现出最好的效果。
为了给大家一种直观感受,先放出一张原始图片:

这是没有处理前直接合成的图像:

这是经过处理后合成的图像:

现在正式开始我的讲座!首先是目录
分离三个通道
这一步我用的最简单的方法,也就是把原图每1/3高度裁剪一次,分别对应蓝、绿、红通道的图像。当然,你可以发现其实这三幅图并不是那么精确地按照1/3的高度排布的,因此更好的方法例如:对边进行扫描,截取非黑边的部分。我的设想是,由于输入图片是黑白,因此只有一个色彩通道,我们可以略微加深对比度,使边缘黑框成为纯黑,然后在图片高度的每隔1/3处向上下扫描,如果遇到超过一定比率的像素块不为黑色,那么就停止扫描并且裁剪。图像对齐
基本思路
因为三张图片差别并不大,我们只需要以某一个通道的图片为基础,通过搜索找出其他两个通道相对于base通道的最佳匹配点,然后进行合并就好。关键是:如何搜索、如何定义“最佳匹配点”。这里,我们用SSD,也就是 平方差匹配法 来作为评判标准。平方差的计算方法是对应像素点差值的平方。计算两个图片的SSD,也就是求所有像素点平方差的和的平均。然后找到SSD最小的那个位置。
暴力方法
首先想到的就是,把base图片放在下面,然后让匹配图片从上往下、从左到右一个像素一个像素扫描,计算最佳的匹配点。也就是考虑每个像素作为图像原点的情况。当然,如果想周全,还可以在匹配图片周围增加一些空白区域,让这些空白区域作为原点(这样相当于匹配图像有内容的部分向右下角移动)。可是这样做,必定是十分耗费时间的。如果图片size为m*n,那么这样操作下来需要O((m*n)^2)的复杂度,稍大点的图片就不能接受。
高斯金字塔
这里我们介绍一个得力助手:高斯金字塔。Opencv对其有官方讲解。它的结构是这样的: 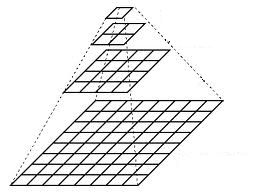
所以,这个金字塔帮我们做的,就是不断减小图片的规模。具体做法是先高斯平滑,然后去偶数行和偶数列生成下一层,这样一来,每一子层的大小是其父层的1/4。你可以设定最高层的大小,30*30或者16*16就好。即便20000*20000分辨率的图片,也不过只有8,9层。这样一来,我们可以先在最小层上找到最佳匹配点的估计,然后慢慢扩大,逐步逼近,这样就会节省大量的时间。
具体做法是,在较顶层的时候,我们用较大的搜索范围来搜索最佳匹配点,这样不会浪费多少时间。而且因为高层的图片较小、模糊,所以哪怕全面搜索也是值得的(因为匹配不是很精确)。但随着层次下降,我们就需要相应地减少搜索范围。由于已经知道了上一层的最佳点(x,y),那么对于当前层,上一层的(x,y)对应这一层的(2x,2y)(根据建立金字塔的规则)。而在金字塔建立的过程中,每四个像素会舍去三个像素,也就是说,上一层最佳匹配点周围会有8个像素是被抛弃的(下图中白格子是下一层被保留的像素,深蓝色是被抛弃的像素,每个白格子周围有8个蓝格子): 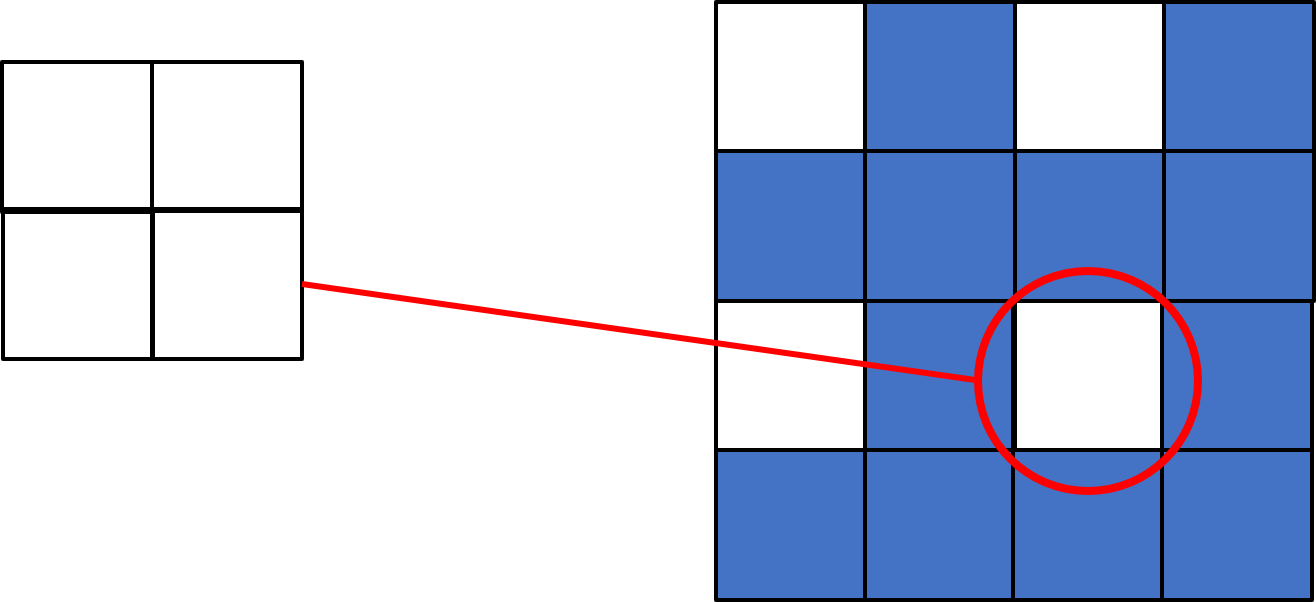
这样一来,由于上一层已经搜索过的点不需要再次搜索,我们只需要在当前层搜索上一层未搜索过的这八个像素点,然后与当前最佳匹配点进行比较就好。
所以,这样一来,除去最高几层的搜索,其他每层只需要搜索9次,运行起来也是飞快啦。
边缘裁剪
问题
合并好我们的三通道图像之后,由于对齐把通道平移的缘故,会发现边缘会出现很多彩色条纹: 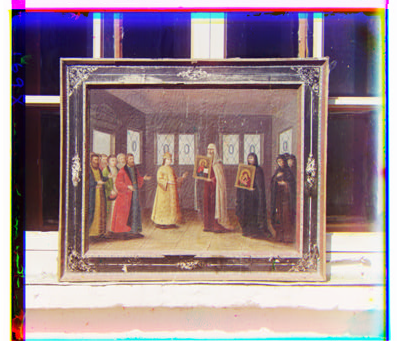
如何尽可能消除这些边框,又不伤害原本的内容呢?
解决第一步
首先我们需要意识到:条纹的产生,主要是因为我们在对齐的时候,由于平移,在一些通道的图像边缘填充了黑色色块。于是很简单的想法就是,只保留平移后有内容的部分。也就是说,裁剪三个通道都有内容部分的重叠区域作为输出。这样一来,边框确实裁剪了不少。
解决第二步
不过恼人的边框依然存在。查看原图的话,你就会发现每张图片边缘会有黑色的区域。怎么消除它们?我用了一个比较笨的方法:先把图片转为灰度图像(只有一个通道),然后在边缘部分,一行一行地搜索,如果连续三行灰度的标准差大于某一个阈值,则判定这时候已经进入了图片内容的部分,停止搜索并且裁剪。否则就可以假设一直都是彩色边框。
消除条纹后的结果: 
色彩校正
问题
简单叠加生成的图片有些斑驳的感觉,如何让它的色彩更加鲜艳呢?
直方图增强对比度
我们用一个很简单但是普遍的方法:增加对比度。把原图转化为灰度图,然后生成这个灰度图的直方图。直方图表示的是在0到255的灰度上,像素点的都分布情况。我们取分布为前5%与前95%的像素点所在的灰度,称为g1与g2,然后把它们当做灰度为0和255的点。简言之,就是对中间部分的灰度进行拉伸变换。解一个方程组:a*g1+b=0 and a*g2+b=255,然后对每个像素点k应用new k = a*k+b,就可以增强画面的艳丽感了!其实,Instagram中的一款名叫Lux的滤镜也使用了类似的方法,具体可以看这里。
这次任务大功告成!其实,有不少可以值得钻研的方面:例如如何进行边缘裁剪,我们可以先用特定的Detector进行边缘检测后,用霍夫变换 (维基:Hough transform)找到一条最佳直线,将其定为裁剪线。又或者对于色彩校正,也有一些更为复杂的方法。原谅我只是刚刚涉及,无力去实现那些看不懂的算法:-)。
除了更加复杂的方法之外,还有一些方面可以思考:例如在图像对齐的时候,我们如果考虑旋转、缩放,会产生更好地结果。也即在x\y二维坐标上增加旋转和缩放两个维度,再次进行搜索。虽然时间会变慢,但结果应该不错,值得尝试一下(旋转和缩放的变换都可以通过与一个矩阵相乘来求得,当然用matlab的话会有相应的函数)。
图像对齐其实是计算机视觉一个很专业的领域,这次任务只是一次浅显的尝试。不过能够重现一百多年前的场景,还是很有趣的。
最后附上这位摄影家拍摄的图片数据库:
jpg格式:http://lcweb2.loc.gov/service/pnp/prok/(注意,以编号+v.jpg格式命名的图片是适合这个任务的图片(最清晰))
tif格式(tif格式非常大,但也更加清晰,可以看到金字塔加速的巨大改善):http://lcweb2.loc.gov/master/pnp/prok/(注意,以编号+u.tif格式命名的图片是适合这个任务的图片(最清晰))